![[ToC]](14_1_toc_off.jpg)
Akio Ishiguro and Masahiro Shimizu, "On the Task Distribution Betwen Control and Mechanical Systems," in Max Lungarella, Fumiya Iida, Josh Bongard, Rolf Pfiefer, eds., 50 Years of Artificial Intelligence, Springer, 2007
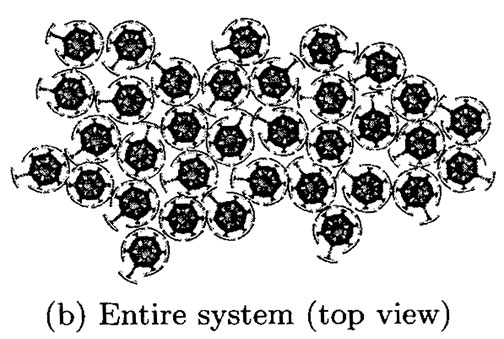
SCHEMATIC OF SLIMEBOT
We can consider a two-dimensional Slimebot whose task is to move toward a goal light. Slimebot consists of many identical modules, each of which has a mechanical structure like the one shown in Fig. 1 (a). A schematic of the entire system is also illustrated in Fig. 1 (b). Each module is equipped with six independently-driven telescopic arms and a ground friction following two types of sensors.