![[ToC]](14_1_toc_off.jpg)
Shrihari Vasudevan, Stefan Gäcther, Ahad Harati, and Roland Siegwart, "A Hierarchical Concept Oriented Representation for Spatial Cognition in Mobile Robots," in Max Lungarella, Fumiya Iida, Josh Bongard, Rolf Pfiefer, eds., 50 Years of Artificial Intelligence, Springer, 2007
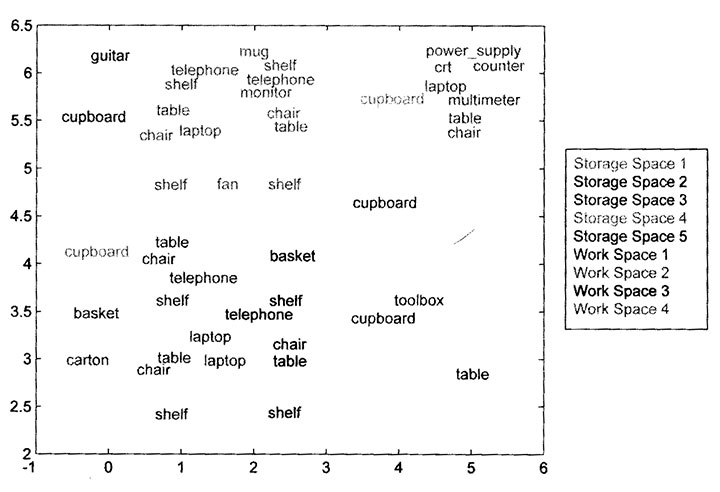
BAYESIAN CONCEPTUALIZATION OF AN OFFICE
The objects are clustered and each cluster is shown with a different color [ed. note: the image is in b&w]. Each cluster is subsequently conceptualized into a functional grouping such as work space, storage space and meeting space. These concepts are in turn used to infer that the place is an office. This is aimed towards robust place classification and also representing space along the lines of fig. 1a.